工业机器人轴和坐标系概述
导读导读本次主要以国产新松机器人作为分析和介绍对象来进行说明,第一章我先介绍《工业机器人轴和坐标系概述》 一、工业机器人轴的定义 1、工业机器人轴可以为旋转轴也可以为平移轴,轴的运行方式由机械

导读:本次主要以国产新松机器人(六轴)作为分析和介绍对象来进行说明,第一章我先介绍《工业机器人轴和坐标系概述》: 一、工业机器人轴的定义 1、工业机器人轴可以为旋转轴也可以为平移轴,轴的运行方式由机械结构决定。 2、工业机器人轴分为机器人本体的运动轴...
本次主要以国产新松机器人(六轴)作为分析和介绍对象来进行说明,第一章我先介绍《工业机器人轴和坐标系概述》:
一、工业机器人轴的定义
1、工业机器人轴可以为旋转轴也可以为平移轴,轴的运行方式由机械结构决定。
2、工业机器人轴分为机器人本体的运动轴和外部轴。
3、工业机器人外部轴又分为滑台和变位机。
4、如果不特别指明,工业机器人轴即指机器人本体的运动轴。
关节坐标系示意图
二、机器人坐标系的种类
在示教模式下,机器人轴运动方向与当前选择的坐标系有关。新松机器人支持4 种坐标系:关节坐标系、直角坐标系、工具坐标系、用户坐标系。
1、关节坐标系:机器人各轴进行单独动作,称为关节坐标系。
2、直角坐标系:机器人的控制中心点沿设定的X、Y、Z 方向运行。
3、工具坐标系:工具坐标系位于机器人腕法兰盘的夹具上,由用户自己定义。夹具的有效方向定义为工具坐标系的Z 轴。
4、用户坐标系:用户坐标系位于机器人抓取的工件上,由用户自己定义。

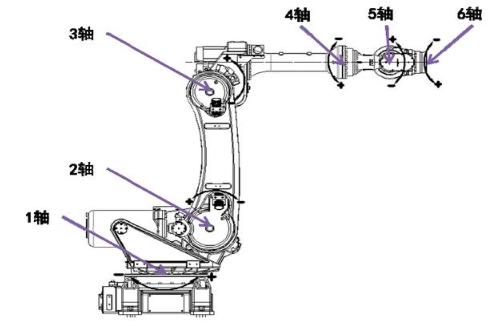
三、工业机器人参考示意图:

免责声明:本文章由会员“马原”发布如果文章侵权,请联系我们处理,本站仅提供信息存储空间服务如因作品内容、版权和其他问题请于本站联系