六大编程技巧带你玩转ABB机器人!

专注自动化培训14年
技成培训网
技术干货|六大编程技巧玩转ABB机器人
ABB机器人Pdisp轨迹偏移使用、单工位多次预约程序、在robotstudio创建两台机器人的socket连接、双工位预约程序、与相机通讯的Socket收发数据处理与提娶如何创建数组等编程技巧,满满的实用干货!
1
ABB机器人Pdisp 轨迹偏移使用
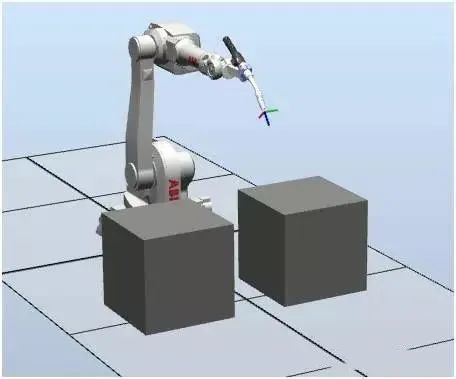
1.如果有下图两个产品,已经完成了右边产品轨迹,左边产品估计一样,如何快速生成左边轨迹(左边产品可能有平移和旋转)。
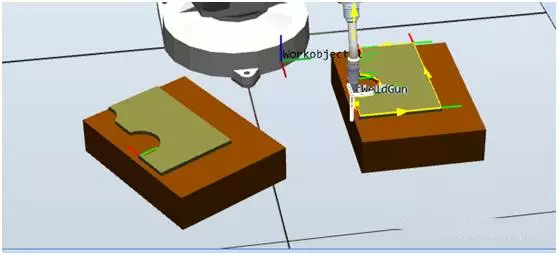
2.完成右边轨迹示教Path_30,如上图。起点为Target_20。
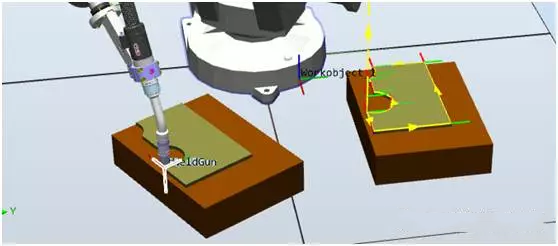
3. 完成左边起点的示教,为Target_ref_start,如下图。
注:如果左边产品轨迹有旋转,示教的Target_ref_start相对于左边产品的姿态要和Target_20相对于右边产品的姿态一致(此处左边产品旋转了30°,示教的角度z方向也旋转了30°)
4.插入指令如下:
MoveJ pHome,v1000,z100,tWeldGunWObj:=wobj0;//移动到Home位置
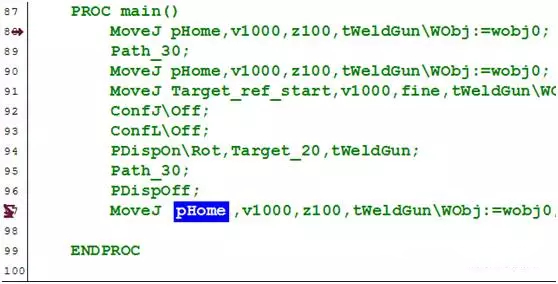
Path_30;//运行右边产品轨迹;
MoveJpHome,v1000,z100,tWeldGunWObj:=wobj0;//回到Home;
MoveJTarget_ref_start,v1000,fine,tWeldGunWObj:=wobj0;//走到左边产品起点;
ConfJOff;//因为使用偏移,关闭轴配置监控,否则有可能使用原配置参数导致位置走不到而报错 ConfLOff; //因为使用偏移,关闭轴配置监控,否则有可能使用原配置参数导致位置走不到而报错;
PDispOnRot,Target_20,tWeldGun;//设定当前位置和Target_20的偏差关系(包括平移和旋转),因为此时机器人停在Target_ref_start起点,即设定左边轨迹和右边轨迹的整体偏移关系。使用 ot表示平移和旋转均计算。如果不使用 ot,则只使用平移,旋转不计算;
Path_30;//运行原有轨迹,此时轨迹参考坐标移动关系,机器人实际走左边产品轨迹;
PDispOff;//轨迹完成,关闭平移关系;
MoveJ pHome,v1000,z100,tWeldGunWObj:=wobj0;
2
ABB机器人单工位多次预约程序
1.机器人有程序如下:
2.工艺过程如下:
机器人在home等待。有人按过di信号,机器人开始执行。人工可以一次性多次预约,即如果人工一次性按过3次,机器人执行三次。
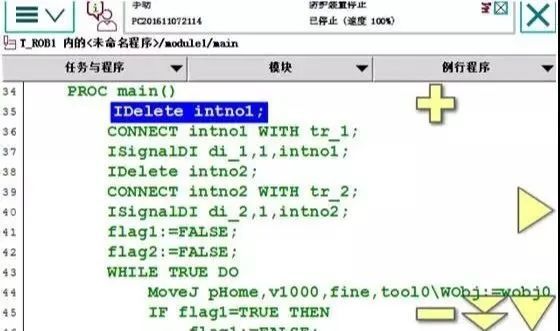
3.我们通过中断来实现。
4.中断的意义为,机器人后台在不断扫描(类似PLC),和机器人前台运动不冲突。后台实时扫描到信号就会去执行设定的中断程序,中断程序里没有运动指令,前台机器人不停,不影响运动。
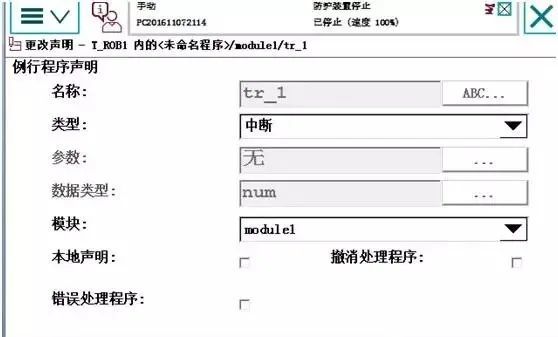
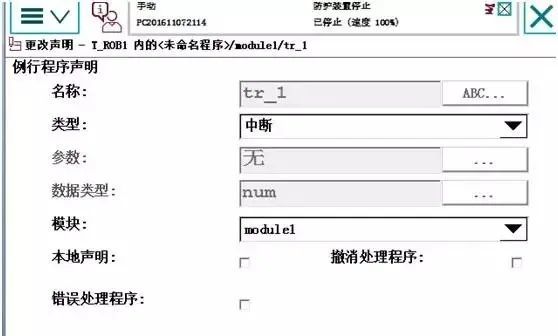
5.新建一个例行程序,取名tr_1,注意:类型选中断(trap)
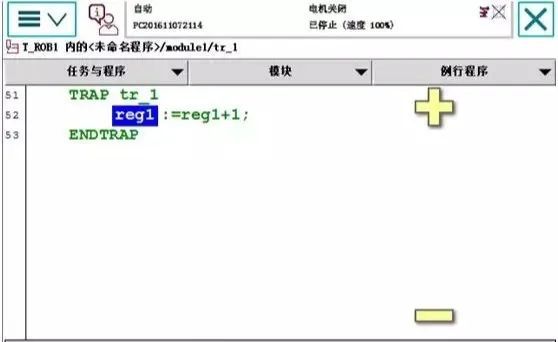
6.进入中断程序,插入指令如下,即当机器人执行中断程序时,给reg1记录次数加1。
7.进入主程序,设置中断及对应的io信号。
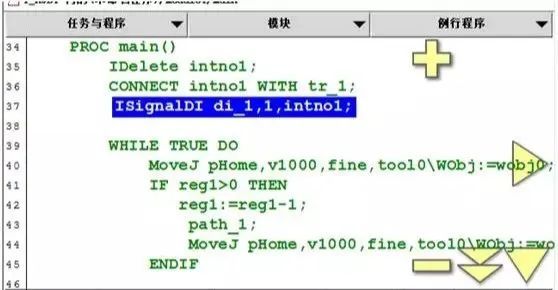
37行的意思是,任何时候di_1信号0变1,就会触发执行tr_1中断程序,即置flag1为true;
35-37行程序只要运行过一遍即可,类似于设置开关,不需要反复运行;
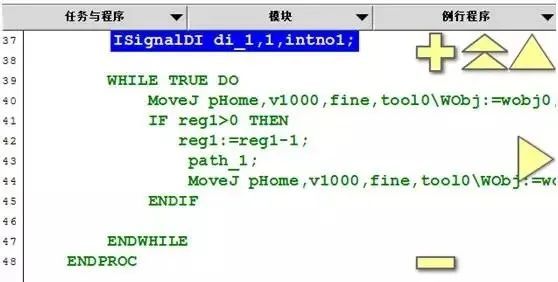
8. 主要程序如下。即如果reg1=0,机器人在home等待
3
在robotstudio创建两台机器人的socket连接
1.什么是socket通讯?
就是TCP/IP通讯,无协议,在微软环境下称为socket。
2.socket通讯能干什么?
可以收发制定的数据,包括sting字符串,byte数组等。
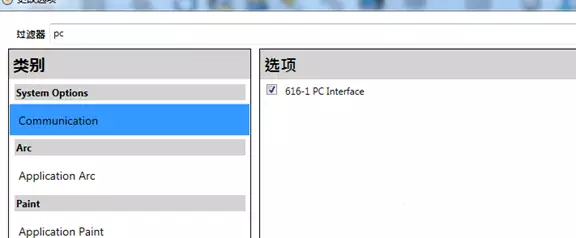
3.创建socket机器人需要什么选项?
机器人需要616-1 PC-INTERFACE选项。

4.socket通讯网线插哪个网口?
Service口(IP固定:192.168.125.1)或者Wan口都可以(可以自己设置)。
5.创建client端的实例
通常机器人和相机通讯,机器人作为client端。
a、新建一个机器人系统,注意建立系统时加入pc-interface选项。
b、为了避免之前的连接没有关闭,先插入socketclose指令,后面的socket1为自己新建的socketdev类型的变量。

c、之后插入创建连接socketCreate。
d、插入建立连接SocketConnect,后面需要制定Server的ip和端口,如果是在电脑和另一台虚拟控制器连接,ip设为“127.0.0.1”,端口自定义,建议不要用默认的1025。
这一步作用为机器人会和server建立连接,如果没有建立成功会一直等待,如果成功则往下执行。
e、此处做测试,在建立成功后,插入TPWrite指令,可以在示教器看到socketclinent connect successful。
f、接下去可以收发数据,此处示例为client先发送数据给server,再接受server发送回来的数据。
g、SocketSend后面可以发送string或者byte数组,具体可以选择不同可选变量。
h、发送完毕后client接受到server发回的数据并写屏。
6.以下为server端示例
a、重新创建一个工作站,创建时不要忘记添加pcinterface选项。
b、作为server,机器人需要创建2个socketdev变量。
c、为了避免之前的连接没有关闭,同样建议先socketclose。
d、

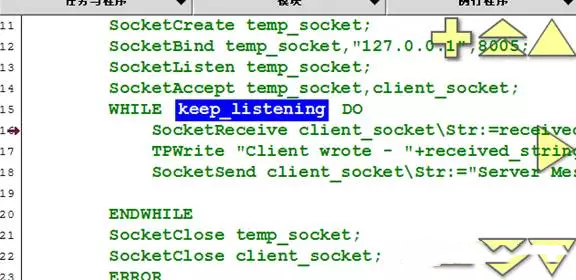
e、接着创建socketCreatetemp_socket 服务器端socketdev。
f、SocketBind为绑定socket要监控的ip和端口,如果是虚拟仿真,ip为127.0.0.1,端口自定义(和client端设置一致)。
g、SocketListen为机器人server监听是否有client连接。
h、socketAccept为接受client的连接。
i、建立连接后,机器人就可以执行死循环,即一直处于收发状态。
j、 之前client程序为client先发后收,故这里server先收后发。
7.client和server都写完后,可以运行,注意先运行server端,即server机器人处于监听状态
8.server机器人收到的讯息如下:
9. client机器人收到的讯息如下:
4
双工位预约程序
1.有如下双工位生产
2.工艺过程如下:
人工完成1#工位上料后按按钮di_1(按钮不带保持,即人手松开信号为0))机器人焊接1#工位。
此过程中人工对2#工位上下料,完成后按di_2完成预约(即不需要等机器人完成1#工作)。
机器人完成1#工作后,由于收到过di_2预约信号,机器人自动去完成2#工位
3.我们通过中断来实现。
4.中断的意义为,机器人后台在不断扫描(类似PLC),和机器人前台运动不冲突。后台实时扫描到信号就会去执行设定的中断程序,中断程序里没有运动指令,前台机器人不停,不影响运动
5.新建一个例行程序,取名tr_1,注意:类型选中断(trap)
6.进入中断程序,插入指令如下,即当机器人执行中断程序时,给bool量置true

同理设置第二个中断程序

7.进入主程序,设置中断及对应的io信号
37行的意思是,任何时候di_1信号0变1,就会触发执行tr_1中断程序,即置flag1为true
35-40行程序只要运行过一遍即可,类似于设置开关,不需要反复运行
8.主要程序如下。即如果没有人给di信号,机器人就在home位等待。
5
与相机通讯的Socket收发数据处理与提取
1.相机通常发送字符串给机器人,比如”1.23,4.56,7.89D”,即x为1.23,y为4.56,z的角度为7.89,用D作为结束符,数据之间用“,”隔开。
2.如果机器人收到上述字符串,如何把字符串提取出来并付给变量deltaX,deltaY,和thetaZ?
3.建立若干num变量,用以存储过程数据,比如StartBit1,表示x的数据从第几位开始,Endbit1表示x的数据结束是第几位,Lenbit1表示x数据的长度,s1表示提取的x的值的字符串
4.
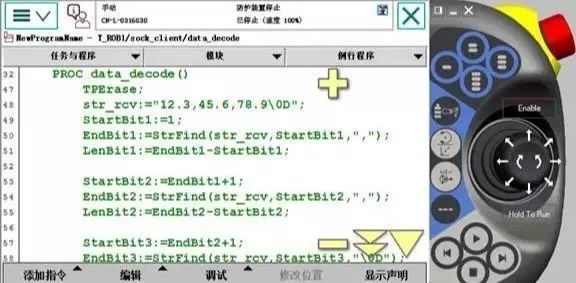
5.先假设x的第一位是1,给Startbit1赋值为1
6.插入函数strfind,查找第一个“,”在第几位,得到EndBit1值
7.
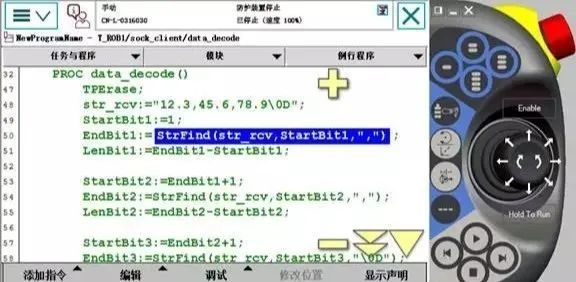
8.EndBit1减去StartBit1就是x的数据长度
9.同理得到y和theta的信息

10.通过StrPart函数,提取从StartBit1开始到LenBit1结束的字符串,即x的值的字符串
11.

12.同理得到y和z的字符串
13.通过StrToVal函数,把s1转为num型,付给delta_x, StrToVal函数的反馈值为bool量,即转换成功为true不成功为false
14.同理得到delta_y和delta_theta
15.成功后可以写屏测试,如下图:
6
ABB机器人如何创建数组
1.什么是数组?
将相同数据类型的元素按一定顺序排列的集合
2.有什么用?
比如创建一个robtarget类型的数组p_array,p_array里有10个点位,走完10个位置就可以用如下代码,方便简洁
FOR i FROM 1 TO 10 DO
MoveL p_array,v500,z1,tool0;
ENDFOR
3.哪些数据类型能创建数组?
所有数据类型都可以创建数组
4.数组最大几维?
ABB机器人">ABB机器人数组最大三维!
5.数组起始序号是0还是1?
是1
6.如何创建?
a.程序数据
b.选中类型,比如Robtarget
c.新建,设置名称,维数(这里举例1维),每个维度的元素数量(举例为10)
d.创建完,就有了一个10个数据的p_array,
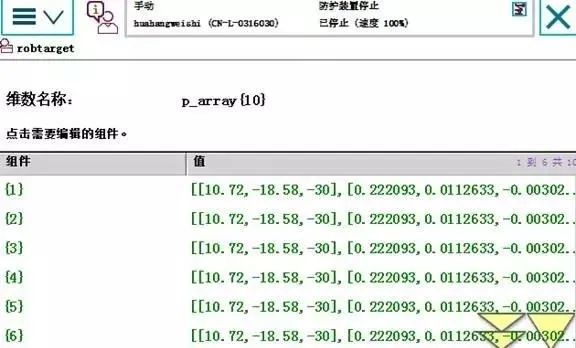
e.修改点位,点击上图上某一行,修改位置,即把数组里的某一个元素位置修改了。