天天津大学学研制出3D打字与印刷软性呆板人,可运用于人为肌肉

导读:一只精致的尺蠖,牢牢地抓住圆形管,一伸一缩中曲折前行。 究竟上,这只精巧的尺蠖是一款采用了天天津大学学研究开发的一种新式模块化柔性启动本领, 用3D打字与印刷机直接打字与印刷出来的软性呆板人。 软性呆板人因其较高的柔性和对人体安定等便宜,在近几年获得了贯穿一致的关...
一只精致的尺蠖,牢牢地抓住圆形管,一伸一缩中曲折前行。究竟上,这只精巧的尺蠖是一款采用了天天津大学学研究开发的一种新式模块化柔性启动本领,用3D打字与印刷机直接“打字与印刷”出来的软性呆板人。
软性呆板人因其较高的柔性和对人体安定等便宜,在近几年获得了贯穿一致的关心。而3D打字与印刷的上风即是创造搀杂形骸、搀杂构造并且不须要后续加工,可一次成型。
打字与印刷免组建构造,是3D打字与印刷本领创造软性呆板人比年来一个比拟典范的运用。
不日,天天津大学学左思洋、刘建彬课题组提出了一种鉴于薄膜气缸的新式模块化柔性启动本领,并经过按照简直运用变换陈设拉拢办法以及合理安置贯穿计划,将其运用于人为肌肉和管道匍匐呆板人中。
该本领鉴于一次3D打字与印刷成型的创造本领,省掉了保守机电摆设加工创造中的安装过程,大幅贬低了启动模块的创造本钱和周期,且完备耗襟怀孝动静相应高、真实性高、对运用场景符合性强等特性。
该功效2021年1月初在线公布在《美利坚合众国电气电子工程师学会呆板人和自动化快报( IEEE Robotics and Automation Letters)》上。
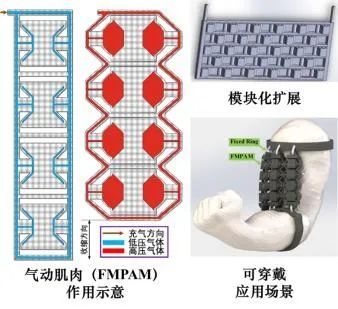
鉴于薄膜气缸的新式气动听工肌肉安排观念及其运用场景
“每一个薄膜气缸就比如人体的第一小学块肌肉,大概爬虫的一个‘节’,只但是是用热塑性聚氨酯材料做的。”刘建彬表明说,采用这种新式薄膜气缸构造是共青团和少先队的“奇思妙想”。
即使把这个构造比方成一个基础的肌肉单位,那按照不同的运用需要再对这些单位的贯穿办法进行陈设拉拢和构造贯穿,就像是把一个个的肌肉单位贯穿起来产生一整块肌肉,而后再运用于不同场景,而整块“肌肉”的创造进程则采用了3D打字与印刷本领,一次成型。
鉴于此创新意识,课题组开始提出了一种新式气动听工肌肉,可运用于柔性外骨骼等人机交互装置的启动中。气动即以收缩气氛为动力源,开辟板滞实行伸缩或回旋办法。
与保守气动听工肌肉比拟,该安排最超过的特性是不会爆发厚度目的的伸展,进而遏止了对人体的挤压。
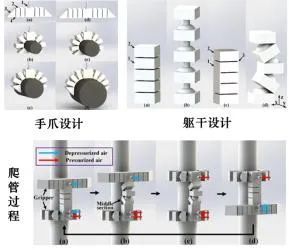
鉴于薄膜气缸的管道匍匐呆板人安排观念
其他,课题组还提出了一种新式气动管道匍匐呆板人,可运用于产业管道办法的查看和及时监察和控制。该管道匍匐呆板人采用仿生尺蠖道理,经过精巧安置薄膜气缸单位之间的贯穿,实行呆板人在管道内、外壁面匍匐。
柔性启动办法的运用使该呆板人不妨符合大范畴管道直径的变革,并可应付直管、弯管、竖管、程度管以及百般角度歪斜管运用场景,同时呆板人可接受自重80倍以上负载。
由于采用了气动的本领启动,软性呆板人只能拖着长长的气管尾巴处事。即使将传感器集成到摆设中,也就能去掉这些气管尾巴,使呆板人更独力精制。这也是科学家们将来的全力目的。
(光彩日报全媒介记者 刘茜 陈建强 通信员 刘晓艳)
热门视频引荐
根源:光彩日报全媒介记者 刘茜 陈建强 通信员 刘晓艳
图片:搜集
责任编辑:张永群
编纂:邢妍妍