哥伦比亚大学工程师们创作出能展示“基础同理心”的呆板人

导读:哥伦比亚大学的工程师们创作了一种呆板人,它不妨学会用视觉猜测它的搭档呆板人的动作。工程师表白,该呆板人仍旧展示出了一丝同理心。这一冲破不妨扶助呆板人在将来更直觉地与其余呆板人和人类相处。该呆板人学会了按照几个初始视频帧猜测其搭档呆板人的未...
哥伦比亚大学的工程师们创作了一种呆板人,它不妨学会用视觉猜测它的搭档呆板人的动作。工程师表白,该呆板人仍旧展示出了一丝同理心。这一冲破不妨扶助呆板人在将来更直觉地与其余呆板人和人类相处。该呆板人学会了按照几个初始视频帧猜测其搭档呆板人的将来动作和目的。
猜测临近其余人会做什么是人类天然而然的工作,这让咱们更简单所有生存和处事。对呆板人来说,猜测将来的办法是一个宏大的挑拨,也是呆板人从来不长于的工作。哥伦比亚大学的接洽职员仍旧介入了一项更一致的全力,扶助呆板人运用视觉查看领会和猜测其余呆板人的目的。
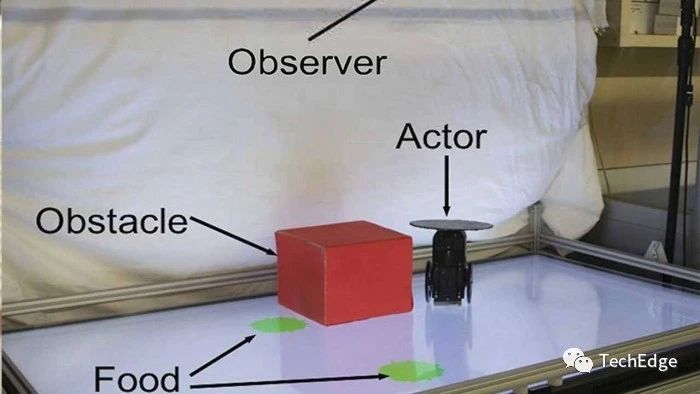
接洽职员创造了一个呆板人,并将其安置在一个大概3*2英尺大小的玩耍圈中。呆板人被编制程序为探求并向它能看到的任何绿色圆圈挪动。题目是,偶尔呆板人不妨用它的摄像头看到一个绿色的圆圈,并直接向它挪动,但其余功夫,绿色的圆圈会被一个宏大的纸板箱挡祝在这些情景下,呆板人会向不同的绿圈挪动,大概基础不挪动。
第二个呆板人查看了他的搭档挪动了大概两个小时,查看的呆板人发端猜测它的搭档的目的和路途。在没有被精确奉告搭档呆板人的能见度妨碍的情景下,呆板人查看者最后不妨在不恻隐况下猜测搭档呆板人的路途100次中的98次。查看者呆板人不妨与它的搭档爆发“同理心”,而且在没有人类引导的情景下领会它的搭档能否不妨从它的有利场所看到绿色的圆圈,这表露了一种原始情势的“同理心”。
接洽职员供认,呆板人的“同理心”比人类的动作和目的要大略得多。但是,他们觉得这大概是给呆板人供给被认知科学家称为“心智表面(Theory of Mind)”的东西的发端。