草履虫大小的微型机器人:激光驱动,未来可用于显微外科手术!

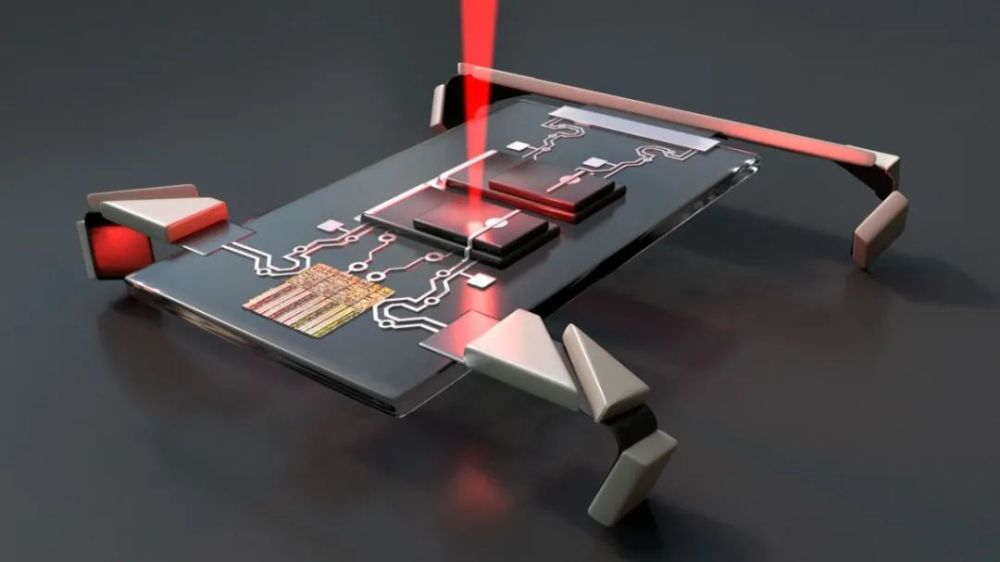
指南:江苏激光联盟指南:据报道,《Nature》报道了美国康奈尔大学的最新研究成果,该大学的研究人员领导了第一台带有半导体元件的微型机器人的研制。机器人的大小和草履虫差不多,腿可以用激光控制。微型机器人示意图:来自康奈尔大学和宾夕法尼亚大学.
江苏激光联盟简介:
据悉,《Nature》报道了美国康奈尔大学的最新研究成果,该校研究人员领导开发了第一个带有半导体元件的微型机器人。机器人的大小和草履虫差不多,腿可以用激光控制。
微型机器人示意图
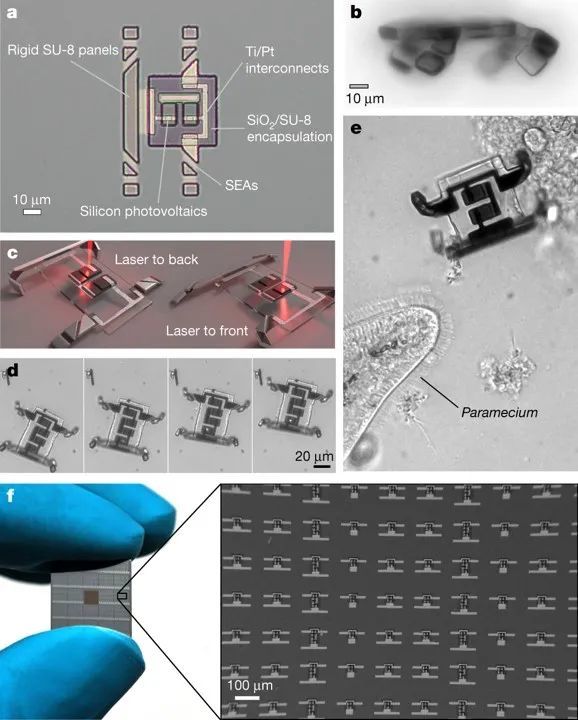
插图:康奈尔大学和宾夕法尼亚大学的研究人员建造了一个微型机器人,它由一个简单的硅光电电路组成。本质上主要是躯干和大脑,四个电化学执行器用来执行腿部功能。当激光照射硅光路时,微型机器人就会行走
1959年,康乃尔大学的理查德费曼曾经做过一个著名的演讲:“底部有一个巨大的空间”。在这篇著名的演讲中,他提到了一种微制造技术,可以实现惊人的微尺寸。而且,这个底层开始变得越来越拥挤。
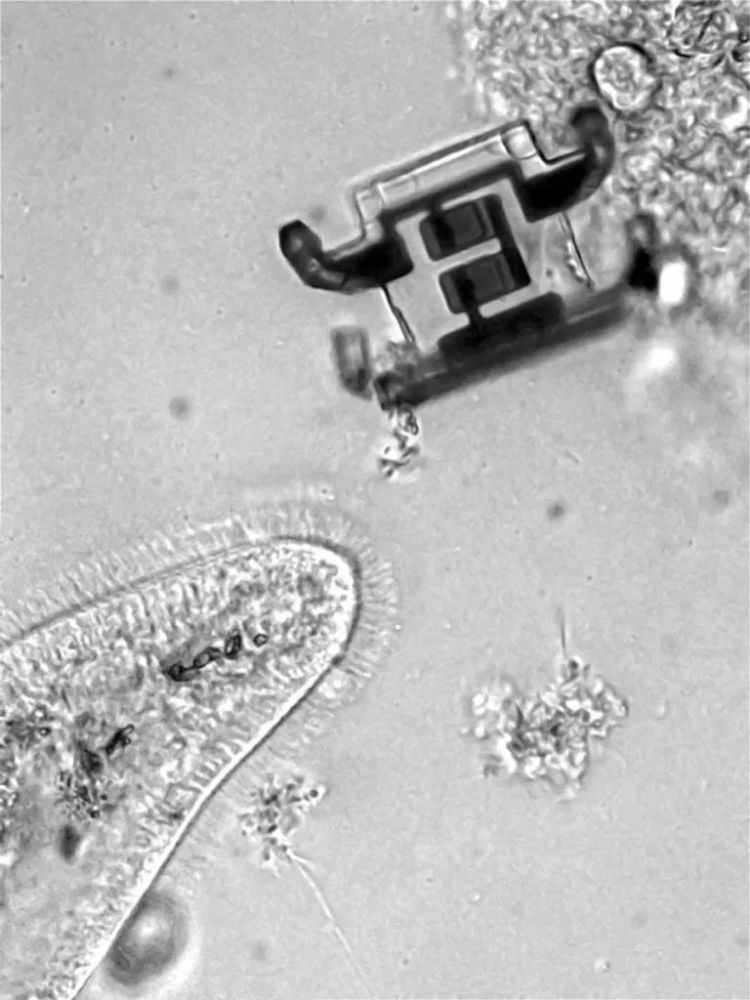
目前,康奈尔大学开发的机器人厚度约为5微米,宽度约为40微米,长度范围为40-70微米。肉眼几乎看不到,只能用显微镜观察,并且可以很容易地吸入注射器,从而实现了医疗行业应用中的微纳机器人手术。
这个微纳机器人通过激光照射控制机器人前后腿的交替运动,从而实现在液体中游泳
这种微纳机器人,因为体积小,只有草履虫那么大,大量制造,科学家可以做到“把豆子撒进士兵”,可以一次性批量制造成千上万个这样的微纳机器人,形成不可估量的“大军”。
那么为什么这个新工作这么特别呢?在过去十年左右的时间里,科学家们一直在解决困难,努力开发能够在液体中游泳的微纳小型机器人。曾经,它们比康奈尔大学制造的机器人体积更小,行走更快。那么这个微纳迷你机器人有什么独特之处呢?
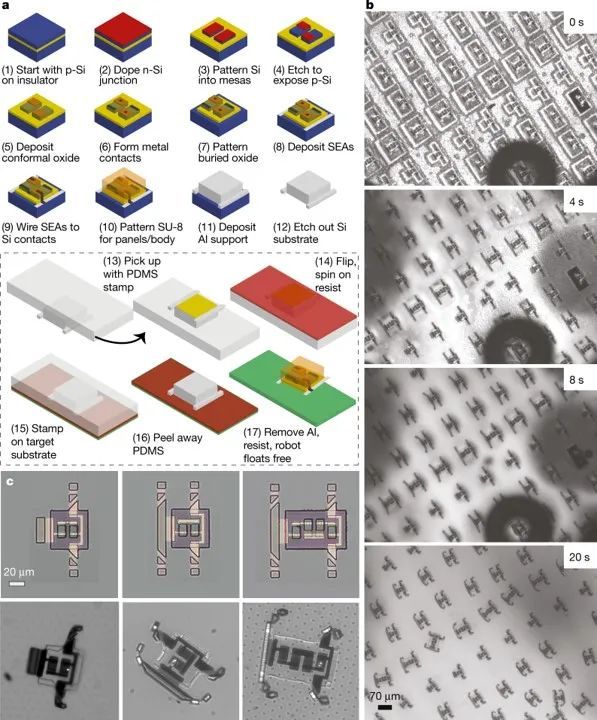
首先,微型机器人采用类似于制造芯片的制造工艺。一个4英寸的晶圆可以生产100多万个机器人。
皮带的超薄特性使机器人的腿可以快速弯曲而不会断裂
电子集成微纳小型机器人并行批量制造
微纳机器人是由康奈尔大学领导的研究创造的,它集成了半导体元件,使机器人易于控制,并使机器人的行走在标准电子信号的控制下可控。
这些只有草履虫大小的机器人,为制造更复杂版本的机器人提供了模板,可以利用硅基智能技术批量制造,甚至在未来的某一天应用于人体组织和血液。
这项合作研究是由物理教授Itai Cohen和物理科学专业教授约翰纽曼(John A. Newman)的保罗麦克尤恩(Paul McEuen)完成的,两人都在科学与艺术学院工作,他们的前博士后研究员马克米斯金(Marc Miskin)现在是宾夕法尼亚大学的助理教授。
微纳机器人的制造与发布
该研究小组的研究结果发表在今年的《Nature》杂志上,标题为“电子集成、大规模制造的微型机器人”。
微纳机器人的制造非常困难,尤其是在设计小型驱动器时,这些驱动器是用来驱动机器人行走的电机。传统的驱动器在如此小的尺寸下不容易工作,新的驱动器在受到机械力如磁力的驱动时很难与传统的硅基微电子集成。现在,这个研究小组开发了一种新型驱动器,可以用电力驱动,通过层层堆叠电路来控制。这为微电子研究融入过去50年里难以被人眼看到的微纳小型机器人开辟了一条道路。
微型传感器(图像来源:亚历杭德罗科尔特斯)
这款步行机器人是最新的迭代产品,在很多方面都有进化。科恩和麦克尤恩早期的纳米尺度机器人是基于微纳传感器和石墨烯的自动折纸机器人。
这个新机器人大约5微米厚(1微米是百万分之一米),40微米宽,40到70微米长。每个机器人由一个简单的硅光电电路组成。它的功能是躯干和大脑,有四个电化学驱动器,起到机器人腿的作用。
像你能看到的任何小机器一样,制造这种机器人的腿是一项壮举。
“在这种机器人大脑的背景下,有一种感觉,我们正在谈论现有的半导体技术,使机器人小型化和可释放,”麦克尤恩说,他是下一代纳米科学和微系统的联合主席,也是康奈尔大学卡弗利研究所的负责人。
但是这种机器人的腿以前是不存在的,麦克尤恩说。没有小型电动驱动器可供我们使用,所以我们必须发明这些驱动器,并将它们集成到电子设备中。
新机器人大约5微米厚,40微米宽,40到70微米长。大约草履虫大小
利用原子沉积技术和光刻技术,研究小组构建了机器人的腿,腿由厚度约为十个原子的铂薄带制成,一侧覆盖有一层惰性钛。中性放电是通过施加Pt的正电极放电和施加带电离子在被液体包围的液体表面上吸收和泄漏而实现的。这些离子驱动暴露的铂膨胀并弯曲薄带。这种超薄的薄带使材料急剧弯曲而不断裂。为了帮助实现机器人腿部的三维运动,研究究人员在薄带的顶部进行图案刚性聚合物板。板子之间的间隙行使膝盖或脚踝的功能,使得机器人的腿在可控的程度下进行弯曲,由此实现了运动。
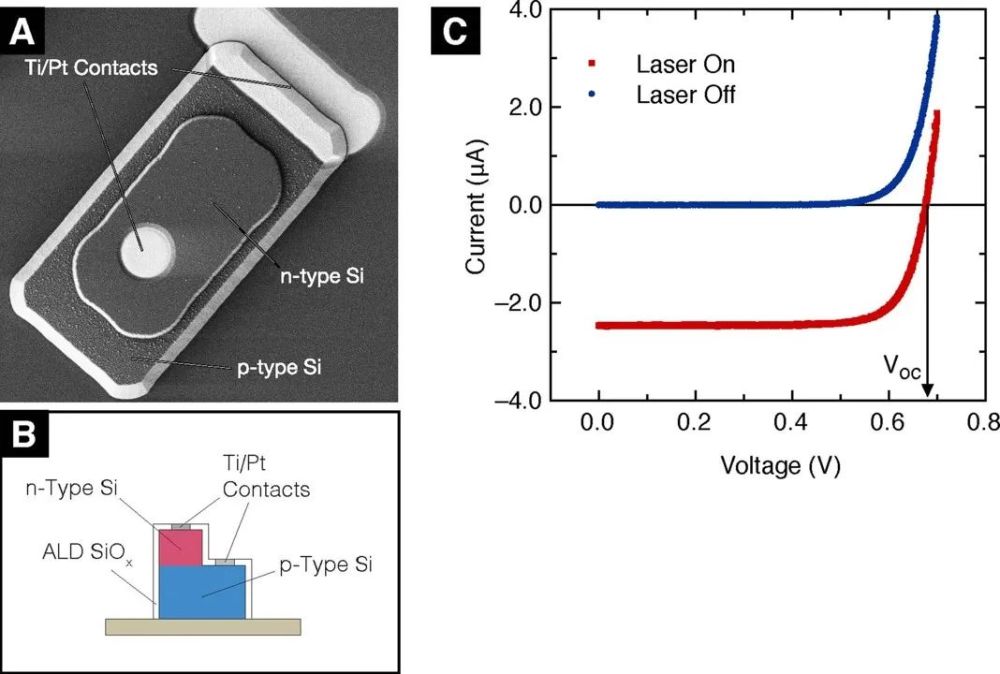
研究开发的机器人腿部的光电特性
研究人员通过不同光伏发电,利用激光脉冲的照射来控制机器人的运动,每一次放电可以实现对单独一个机器人的腿进行驱动。通过控制激光,不断的对机器人前后腿的光伏进行照射,机器人实现行走。
目前研制的这类机器人从功能上来说还是比较原始的,他们行走的速度还不够快,而且他们目前还不能具备大量的计算能力,但这次的革新在于我们使得该款机器人可以同标准的微处理芯片制造技术整合在一起,为我们制造更加智能,快速和批量制造微纳机器人开辟了一条道路。
机器人理所当然属于高技术,但他们运行在低电压(200毫伏)和低功率(10 纳瓦)的条件下,并且相对尺寸来说保持着强且有力的特点。因为他们是采用标准的光刻工艺机型制造的,他们可以实现平行制造:在一个4英寸的硅晶圆上可以制造出100万个机器人。
研究人员目前正在探究一种可以加大机器人的马力的办法,同时实现实现复杂的电子和计算功能,这一技术的改进在将来带来的直接后果就是导致成批的微纳机器人在材料中爬行和重组,或者缝合血管,或者集体派遣来探测人体大脑。
控制小微型机器人,也许可以缩成一团,和你一样亲密,我认为这类机器正在进入各种令人惊奇的世界中,任何非常小的却最终被我们所观察,Miskin说到,也是一名该论文的作者。
这一研究的最大进展在于为我们提供了令人激动人心的科学机会,研究同活性物质相关的新问题和最终导致未来机器人材料的出现,Sam Stanton说到,他是海军研究办公室的项目管理者,是资助该项研究的管理者。
该项研究白得到了美国空军科学研究办公室的额外资助,康奈尔大学材料研究中的资助,国家自然科学基金的资助以及康奈尔大学纳米科学Kavli 研究所的资助。这项研究工作是在康奈尔大学的纳米科学中心和技术研究室完成的。