内地大学磁球机器人第一届世界顶尖学术会议最佳论文奖

导读:提起呆板人,很多人城市直观地设想到板滞状的人形,大概是像波士顿动力的呆板狗普遍的四足仿生呆板人。它们模仿人民代表大会概其余动物的肌肉和骨骼构造。本来呆板人的范围远远不只于此,影戏《超能陆战队》就展现了其余两种对于呆板人的设想,一个是有柔嫩皮肤,又...

提起呆板人,很多人城市直观地设想到板滞状的人形,大概是像波士顿动力的呆板狗普遍的四足仿生呆板人。它们模仿人民代表大会概其余动物的肌肉和骨骼构造。本来“呆板人”的范围远远不只于此,影戏《超能陆战队》就展现了其余两种对于“呆板人”的设想,一个是有柔嫩皮肤,又会积极抚慰人的“表露”;一个是由多数微磁单位构成、大肆变形的呆板人。
这品种型的呆板人叫做模块化自重构呆板人(Modularselfreconfigurable robot, MSRR)。这种呆板人属于一种特出的多呆板人体例,由洪量同构的呆板人模块构成。比拟于样式固定的呆板人,这类呆板人功效百般、可扩充性强、也具备更强的鲁棒性。
“《超能陆战队》内里这个例子,我感触是MSRR 最后蓄意做到的,有点像生物的细胞,几百亿以至几千亿个小细胞动作单位,构成了一个宏大并且搀杂的人命共通体,最后这个共通体不妨按照需要自在地变换形势及功效。”香港华文大学(深圳)理工科学院的梁冠琪接收采访时说。暂时,他在该校的呆板人与人为智能试验室攻读博士学位二,导师是试验室实行副主任林天麟熏染。
前不久,梁冠琪动作第一作家的论文物博物得了IEEE智能呆板人与体例国际聚集(IROS)的呆板人机构安排(Robot Mechanism and Design)最好论文奖。获奖的是一种叫做FreeBOT的球形呆板人体例,它们之间不妨经过磁性自在地贯穿在所有。
呆板人机构安排最好论文奖为本年新增奖项,梁冠琪地方的共青团和少先队所以成为首届获奖者。而除了这篇论文获奖,林天麟共青团和少先队此次有三篇对于MSRR的论文都被IROS接受。其余两篇论文的辨别接洽了体例中单个模块的相对定位,以及动作所有体例的呆板人赶快重构算法。
贯穿不受控制的磁性球体呆板人
MSRR呆板人与罕见的呆板人在样式上有很大的分辨,在安排思绪上也不同。人形呆板人、四足呆板人、大概无人驾驶飞机,这些呆板人样式固定,在安排时会谈商讨量从某些简直功效动身。
而MSRR呆板人则是其余一种思绪,不针对特定的工作而安排。科学家们蓄意它不妨跟着工作和情景的不同,赶快变换自己的构型,进而实行更一致的功效。这种思绪遭到了群居生物的开辟。群居动物拉拢在所有不妨实行远超过个别本领的搀杂工作。比方蚂蚁,在遇到个别难以经过的地形时,不妨彼此贯串身材,构成桥梁等搀杂构造。
所以,MSRR呆板人安排的一个重心题目是模块间的贯穿机构。现有的MSRR体例的贯穿办法都存在某些牵制,两个模块间须要透彻地对准本领贯穿,而且存在特定的贯穿面,一致航天器的对接办法。
梁冠琪引荐,在推敲FreeBOT的安排时,林熏染蓄意不妨尽大概地减少对贯穿的控制,以至做到能赶快及大肆进行贯穿的功效。实际生存中的巴克球这种才华玩物也给了他们开辟。巴克球是一个带磁性的小球,第一次全国代表大会群巴克球能自在拉拢成形形色色的形势。
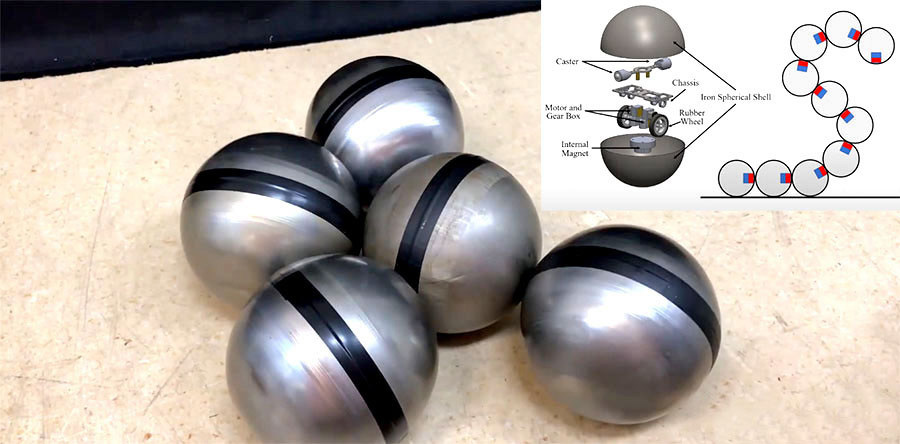
FreeBOT也是运用磁力与另一个FreeBOT表面就任意一点进行贯穿,解脱了保守MSRR 须要在特定贯穿点进行贯穿的牵制。这一本能是何如实行的?FreeBOT的构造重要分为两限制:外部一个铁磁性球壳,以及里面包车型的士启动器。里面启动器上有轮子、马达、磁铁等部件。
启动器像一个小车带着磁铁在球壳里面疏通,进而变换FreeBOT的中心传播及磁效率力的目的,一方面付与FreeBOT独力挪动的本领,另一方面能让FreeBOT经过磁力在另一个FreeBOT上自在往来。
当启动器邻近两个圆球的外表交战点时,传导到表面包车型的士磁性就不妨让两个FreeBOT贯穿在所有。贯穿大概断开贯穿只须要0.5秒的功夫。如许,里面包车型的士启动器,既实行了对单个FreeBOT疏通的遏制,同时也不妨遏制球外部的磁性传导。
依附里面包车型的士宏大磁体,单个的FreeBOT就不妨爬上有磁性的陡坡以至墙面。论文还展现了两个FreeBOT协调实行少许超过个别本领的工作。
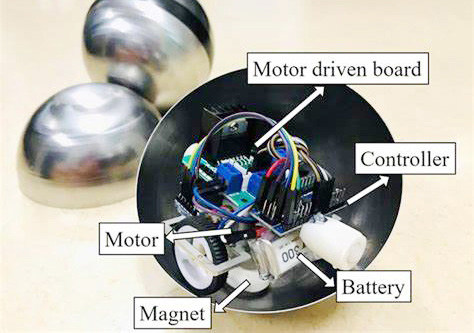
磁铁在启动器的底部,它就会对外壳一直保护磁力,让邻近它的球壳表面具备磁性;同时,磁铁与球壳的内面又非直接交战,而是橡胶轮与球壳内面交战,如许不妨经过遏制橡胶轮,让磁铁在球壳里面回旋目的。要实行自在赶快的贯穿,磁铁的选型以及其隔绝外部铁壳的隔绝须要恰到长处,梁冠琪引荐,考查中央体验过很反复波折。
磁性会跟着隔绝而衰减,所以要尽大概邻近球壳内壁,但是即使太近,也会议及展览现题目。“太近的话,因为磁铁的吸力很大,就直接把小车吸在了球壳上,而且会启发小车形变,就没有方法让小车在球壳内自在疏通。”梁冠琪回顾他在试验中获得的体味。获奖论文所展现的是第一代的版本,梁冠琪引荐,他们暂时正在接洽构造安排上的细节优化。
林天麟共青团和少先队 此次三篇作品当选IROS
林天麟所引导的三篇对于多呆板人体例的论文同时当选IROS,展示了共青团和少先队在这一目的上的探究。林天麟熏染是IEEE高档会员,师从华夏工程院院士徐扬生熏染。他在呆板人和自动化体例的研究开发方面具有充分的功效,大限制论文均公布于呆板人和自动化范围的顶级国际期刊及国际聚集,如T-RO,JFR,T-MECH,ICRA和IROS等。除了模块化呆板人体例,软体呆板人、多呆板人体例、人机协调都是共青团和少先队的接洽目的。
他也是深圳市人为智能与呆板人接洽院(AIRS)的成员。这个接洽院依靠于香港华文大学(深圳),是深圳市当局创造的十大基础接洽机构之一。
此次当选IROS的其余两篇论文,辨别接洽了体例中单个呆板人的相对定位,以及动作所有体例的呆板人赶快重构算法。体例中单个呆板人的相对定位是指,体例中文大学肆一部呆板人及时决定出其余呆板人相对于自己的场所和方位。这是一个由多个呆板人构成的体例平常处事的基础。
所有体例的赶快重构算规则是扶助一个呆板人体例辨别情景而且变换完全构型。比方多个FreeBOT构成的呆板人体例,须要够按照路面情景的不同,贯串安排部队,贯穿进步。
针对这个题目,一篇论文进行了算法安排。在仿如实验中,一个FreeBOT体例不妨赶快符合搀杂的表面,经过“变幻队形”上任阶,翻越妨碍物。
用MSRR进行非构造化情景探究
《超能陆战队》中,小宏安排的微磁呆板人体例不妨构成一只宏大的手掌,并做出招手的模样。如许一个办法看起来大略,在安排上却特出艰巨。“这诉讼要求最底下的模块,不妨供给如许一个自在度,这边面就有物理学上的瓶颈。”梁冠琪引荐。
这是深沉的目的。但是短期内,科学家们蓄意MSRR不妨扶助人类进行非构造的情景探究,更加是地动、火警等情景中实行探究、越障、抓取等工作。如在灾后的废墟现常此刻也有少许探勘情景的呆板人,比方蛇形呆板人不妨探究少许渺小的缺陷,但是遇到断桥大概高楼如许的构造,疏通保持会受限,而一个MSRR呆板人就不妨更精巧地符合百般地形。
假如灾后现场有一个很小的地道,而生还者在地道的另一头,这功夫板滞臂的功效无法发挥开,MSRR就不妨用小模块的办法经过地道,到另一端再从新构型,而且实行板滞臂的功效。
要实行如许的功效,就须要比拟大范围的体例。梁冠琪引荐,梁冠琪引荐,暂时FreeBOT不过考证了一种能实行赶快并大肆贯穿的机构安排。
而将来,共青团和少先队蓄意不妨在呆板人上安置传感器及遏制器,使其成为传播式的自决体例。其他,当更多的FreeBOT产生一个体例的功夫,就须要定位和疏通筹备的算法引导其挪动。更大的体例也对传感器安置、巩固FreeBOT的板滞本能、更长功夫的续航提出了更高的诉讼要求。
FreeBOT是梁冠琪科学研究道路上的第一个大作,在导师手把手的引导下,他发端渐渐领会何如去安排呆板人。他会去提防身边百般会动的货色,查看他们是为什么能动,比方阛阓里罕见的鼓风机充气玩偶,会遭到气流的感化从来动摇,也有安排成呆板人的后劲。“别致呆板人的安排,无非是经过少许别致的构造和本领为呆板人供给自在度。而这些自在度是何如来的,大天然和凡是生存常常会报告咱们少许风趣的答案。”