腾讯四足移动机器人Jamoca出道,可以挑战困难李子堆

导读:腾讯科学技术讯 11月20日,腾讯颁布了其在移功效器人接洽方面包车型的士新发达:四足移功效器人 Jamoca 和自平稳轮式移功效器人初次对外亮相。 Jamoca 是海内首个能实行走梅花桩搀杂挑拨的四足呆板人,而自平稳轮式移功效器人的关系接洽功效还当选了呆板中国人民银行业的顶级聚集...
腾讯科学技术讯 11月20日,腾讯颁布了其在移功效器人接洽方面包车型的士新发达:四足移功效器人 Jamoca 和自平稳轮式移功效器人初次对外亮相。
Jamoca 是海内首个能实行走梅花桩搀杂挑拨的四足呆板人,而自平稳轮式移功效器人的关系接洽功效还当选了呆板中国人民银行业的顶级聚集 IROS 2020。
这两项发达均来自腾讯 Robotics X 试验室,属于挪动目的上的本领冲破,也是呆板人最基础的本领之一。
腾讯 Robotics X 试验室于2018年创造,全力促成人机协调的下一代呆板人接洽,创造假造寰球到如实寰球的载体与贯穿器。暂时试验室主攻挪动、精致操纵和智能体等三大通用呆板人本领的接洽与运用,并聚焦于多模态移功效器人的研究开发。

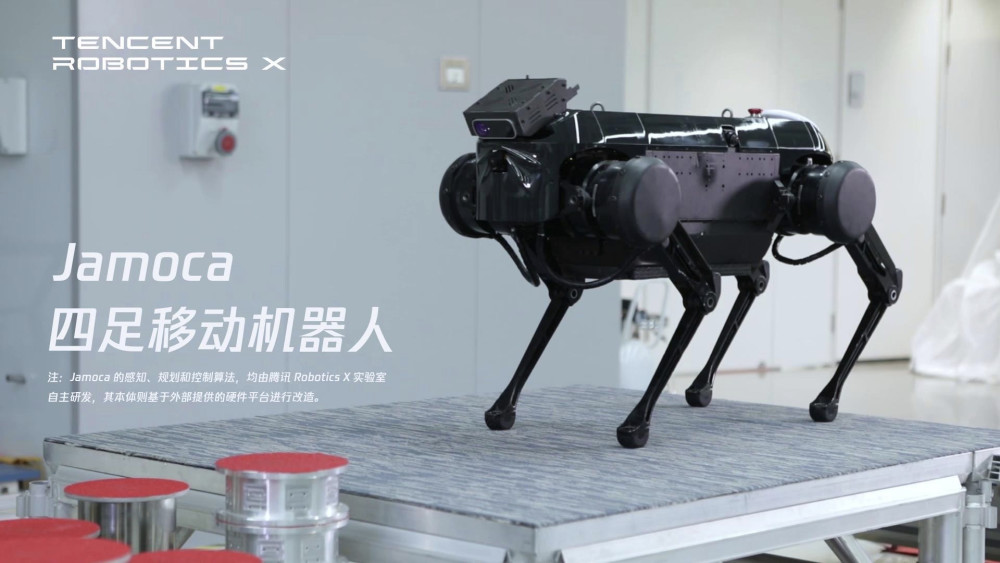
四足移功效器人 Jamoca :能走、能跑、能跳,可挑拨梅花桩搀杂地形
“少林从师数十冬,梅花桩上练真功。爱不释手刻意修,定可成名盖群雄。”
梅花桩是华夏工夫的要害演练道具之一,习练梅花桩也是武侠演义中等维修炼轻功的基矗此刻,梅花桩上迎来了一位新的“练功者” 腾讯四足移功效器人 Jamoca。
Jamoca 本质鉴于外部供给的硬件平台改装,重约70公斤,长1米、宽0.5米、站高0.75米
四足移功效器人,更罕见的一个名字是呆板狗。腾讯 Robotics X 试验室在外部供给的本质之上,鉴于自行研制的呆板人遏制本领,为 Jamoca 创造了一个能应付搀杂情景的智能大脑。这个大脑让 Jamoca 能行走、小跑和腾跃,并付与了它自决定位和避障的本领。

此次 Jamoca 实行的挑拨由高60厘米、呈20°斜面角度的台阶和邻桩最大高度差16厘米、间距不等的梅花桩两限制构成。
据腾讯 Robotics X 试验室接洽员引荐,和国际上其余四足呆板人走木块的场景比拟,此次 Jamoca 所挑拨的梅花桩落脚面积更孝高度更高,并有台阶的拉拢,实行的难度要更大。
个中,检验呆板人挪动本领的难点重要有两个:领会梅花桩的排布(包括场所和高度)、采用最好落脚点及道路并宁静精准地行走(落脚到梅花桩重心点)。
这正对应了试验室在挪动本领方面探究的的两个重心本领模块:感知、疏通筹备与遏制;同时二者经过试验室的另一重心本领模块:整机体例安排与搭建,实行了体例性的集成融洽。
从 Jamoca 挑拨的截止看,腾讯 Robotics X 试验室仍旧到达了极高的本领规范缺点1厘米内的感知定位、按照情景进行的10毫秒级道路筹备、鉴于动力学的1KHz及时力矩遏制、梅花桩重心点1厘米内的落脚缺点,以及全体例的高度共同。
在精准情景感知方面,Jamoca 革新性地实行了鲁棒的眼脚标定,并运用RGB-D相机对范围情景进行及时的感知。经过特性点配合的办法,对 Jamoca 自己的疏通轨迹进行在线跟踪,并将鉴于视觉的定位消息与鉴于疏通学的历程计消息和 IMU(Inertial measurement unit,惯性测量单位) 数据进行融洽,普及了定位追踪的精度和频次。同时运用算法辨别和索取出台阶和梅花桩的表面地区范畴和重心点场所,将定位和识其他数据进行融洽,进而重修出所有三维体育场景。
在最优疏通线路筹备和及时的疏通遏制方面,Jamoca 鉴于感知体例及时感知到的呆板人本质及梅花桩场所消息,鉴于质心动力学,实行在线的质心轨迹天生和落脚点筹备。在保护呆板人的四条腿不妨安定地踏到下一步的梅花桩的同时,优化出一条本质挪动长度最短、归纳耗力最小的疏通轨迹,而且不妨在线贯穿地进行上述疏通筹备。
同时,鉴于及时的本质状况估量,Jamoca 不妨贯串质心动力学模子来建立优化题目,及时求解呆板人足端所需的大地副效率力,并贯串反应遏制实行精准鲁棒的及时力控,可实行行走、对角小跑以及腾跃等的疏通遏制。
不同于预先安排好规则之后做反复的疏通的产业呆板人,Robotics X 试验室更关心呆板人蓄意识、有确定的自决个性接洽,手段即是要在有很大缺点定性的动静情景里,不妨实行呆板人的自决确定、自决计划,并自决实行工作。
现阶段,Jamoca 重要用于试验室里面科学研究试验。它的在线情景感知、最优疏通筹备和及时疏通遏制等本领,将来将扶助腾讯其余呆板人产物更好地符合搀杂的实际情景。
停止、前进均能自决保护平稳的轮式呆板人
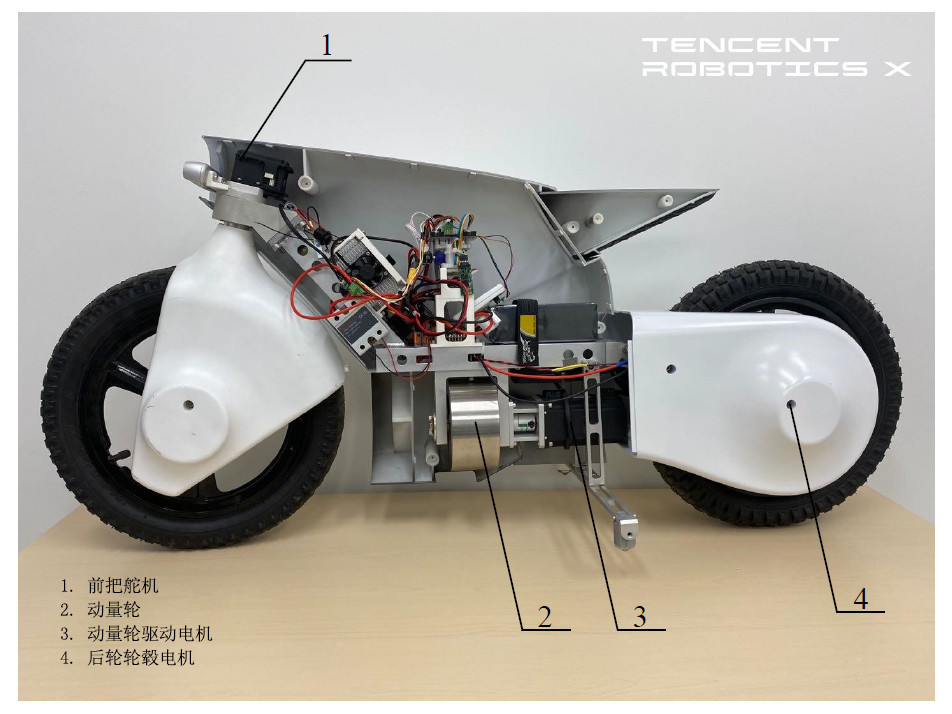
此次一齐亮相的,还有一款自平稳轮式移功效器人,也可称之为自平稳自行车,是腾讯 Robotics X 试验室的首个整机自行研制呆板人。
它在保守轮式移功效器人的基础上,减少了动量轮及其电机启动体例,使得呆板人不妨在停止及前进状况下均保护平稳不倒。
自平稳轮式移功效器人的硬件平台实足由腾讯Robotics X自行研制,重约15公斤,长1.15米,高0.52米
它的遏制本领又不妨细分为前进中的动静自平稳和遏止前进时的静态自平稳。前进中的动静自平稳是依附前把转化从而开辟车身的转化实行,而遏止前进时的静态自平稳则采用动量轮力矩平稳本领,运用角动量守恒的道理实行自平稳遏制。
依附平稳算法,固然遭到确定的外界干预,腾讯自平稳轮式移功效器人仍旧不妨在保护自平稳状况的同时,实行稳固地向前行驶。
呆板人在不同的路面情景下,比方遇到左右坡时,也都展示出了较好的疏通本领宁靖衡本能。以至对于行驶路途上存在特定牵制的情景,比方沿着独木桥行驶的场景,它也能宁静应付。
在此前进行的呆板中国人民银行业国际顶会IROS 2020上,腾讯 Robotics X 试验室颁布的两篇平稳遏制目的的Oral论文,就来自于该呆板人名目。
IROS由IEEE(电气和电子工程师协会)和RSJ(日本呆板人学会)共通举行,是呆板人范围三大国际顶级聚集之一,本年的中心为Consumer Robots and Our Future,接受来自呆板人与人为智能、呆板人视觉、传感器、云呆板人等关系范围的接洽。
在第一项接洽《自平稳轮式移功效器人的非线性平稳遏制:安排与试验》中,腾讯 Robotics X 试验室与纽约大学生界救亡协会调接洽了自平稳轮式移功效器人的动态态平稳遏制的宁静性题目。
在保守轮式移功效器人的基础上,腾讯 Robotics X 试验室减少了动量轮和电机启动体例,运用了级联与阻尼摆设的无源遏制(Interconnection and Damping Assignment - Passivity based Control, IDA-PBC)本领,并运用李雅普诺夫表面从表面上表明了自平稳轮式移功效器人的闭环体例宁静性。
其他,试验室还在自行建造平台上表明了新遏制器功效杰出,能让呆板中国人民保险公司护自平稳,并有确定的抗外界干预本领。
而在另一项接洽《自平稳轮式移功效器人平稳的增益筹备遏制器安排》中,不同于保守本领将静态和动静平稳辨别斡旋,接洽共青团和少先队创造了不妨同时刻画轮式移功效器人动静个性和静态个性的一致的数学模子。
鉴于同一个模子,动静平稳和静态平稳对不同启动输出的依附程度不同,无法运用同样的遏制参数。所以,接洽共青团和少先队运用鉴于增益筹备(Gain Scheduling)的遏制本领。该遏制本领可在两种情景下都保护轮式呆板人的平稳,这一点在表面和试验中都获得表明。
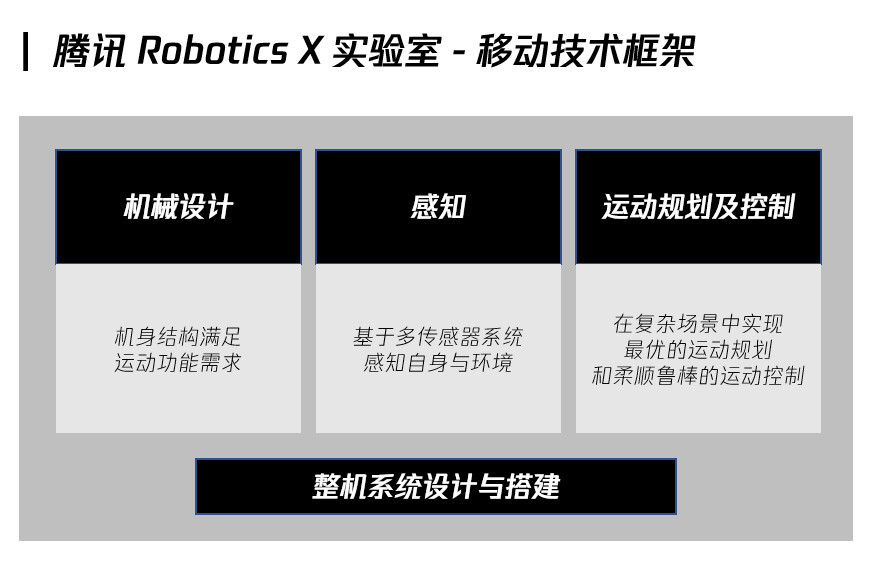
移功效器人的本领框架
腾讯 Robotics X 试验室主攻呆板人挪动、精致操纵和智能体等三大重心通用本领的接洽与运用。
个中,挪动是呆板人最基础的本领之一,此次颁布的两项发达就属于挪动目的。
而挪动目的又可分为四个本领模块:板滞安排、感知、疏通筹备与遏制、整机体例安排与搭建。肤浅的说,前三者辨别是呆板人的躯干、眼睛保卫世界和平大会脑,结果一项则是它的各“器官”融合的本领。
算法自行研制的 Jamoca 恰是贯串了腾讯在感知、疏通筹备与遏制两方面包车型的士接洽功效。而整机自行研制的自平稳轮式移功效器人则不妨视作腾讯在呆板人的板滞安排和整机体例安排与搭建目的本领上的一个历程碑名目。
腾讯 Robotics X 与腾讯 AI Lab 试验室主任张正友博士表白:“挪动或疏通本领,是呆板人最重心、也是最基础的本领之一,确定了它能去到什么场景,做什么工作,将来有什么样的设想力。咱们很欣幸能看到这两项发达,并将贯穿深刻探究呆板人的通用本领,为假造到如实寰球搭建一个有力的桥梁。”