当机器人安装在大脑和小脑上时会发生什么?

导读:图片源@视觉中文学术头条目前,大多数移动机器人还处于非常早期的阶段,对他们来说,智能地做一些工作仍然是一个严峻的挑战。 如何为机器人设计一种类似于人脑的大脑结构来提高其智力,是近年来研究的热点。 实际上,课...


图片来源@视觉中国
学术头条
目前,大多数移动机器人的功能还处于非常早期的阶段,智能地做一些工作仍然是一个严峻的挑战。 如何为机器人设计一种相似的人脑结构来提高其智能,一直是近年来的研究热点。
然而,在第一次提出这一想法时,相应的机器人技术尚未实现。
最近发表在“科学机器人”杂志上的一篇论文详细描述了一个混合系统,它将控制运动的模拟电路与控制感知和决策的数字电路结合起来,不仅显著降低了能耗,而且提高了机器精度和计算效率。
混合系统的关键存储器设备
我们知道,如果机器人想在动态环境中控制身体,它需要有很强的处理能力,这既需要很大的芯片空间,也需要足够的动力来维持它的寿命。 同时,在实时控制中,机器人需要快速获取和处理感官信息,从而对不断变化的环境条件做出快速反应。
传统上,机器人的控制能力主要依靠纯数字方法,但这种数字系统会导致高延迟和高功耗。
在这项工作中,为了使机器人适应环境的变化,研究人员使用记忆器的可重构(可编程电导率)(即记忆装置和电阻装置的组合)来实现机器人的运动控制。 他们使用记忆器来建立一个模拟电路,在这个电路中,一个算法集成了来自加速度计和来自机器人的陀螺仪的数据。
结果表明,该方法显著减少了计算时间,使机器人控制具有更高的精度和速度。
此外,可编程电阻还有一个额外的好处,即允许计算和记忆处于相同的物理位置(这种方法类似于人脑处理信息的方法),从而提高了控制系统的计算效率。 此外,它几乎不受器件变化的影响,而且具有较高的损耗电阻和较长的寿命。
研究人员在实验中只使用了两个记忆器装置。 第一记忆器用于模拟滤波器去除导致机器人不稳定的传感器信号噪声,然后运动控制器接收滤波器波后的传感器信号和第二记忆器来控制机器人。
为了优化第二记忆器的电导率,同时使系统能够立即响应未知和不可预测的情况,研究人员基于随机搜索算法通过自适应学习过程。 实现了一种无模型优化系统参数的方法。
由于滤波器和控制功能的计算是在模拟域中进行的,因此不需要额外的模数转换器或数模转换器,大大降低了系统的功耗,减少了处理时间和整个电路面积和成本。 同时,由于量化噪声的降低,精度得到了提高。 此外,这些函数背后的计算不会发生在系统的数字域中,从而降低了其计算负载。
混合系统的局限性和前景
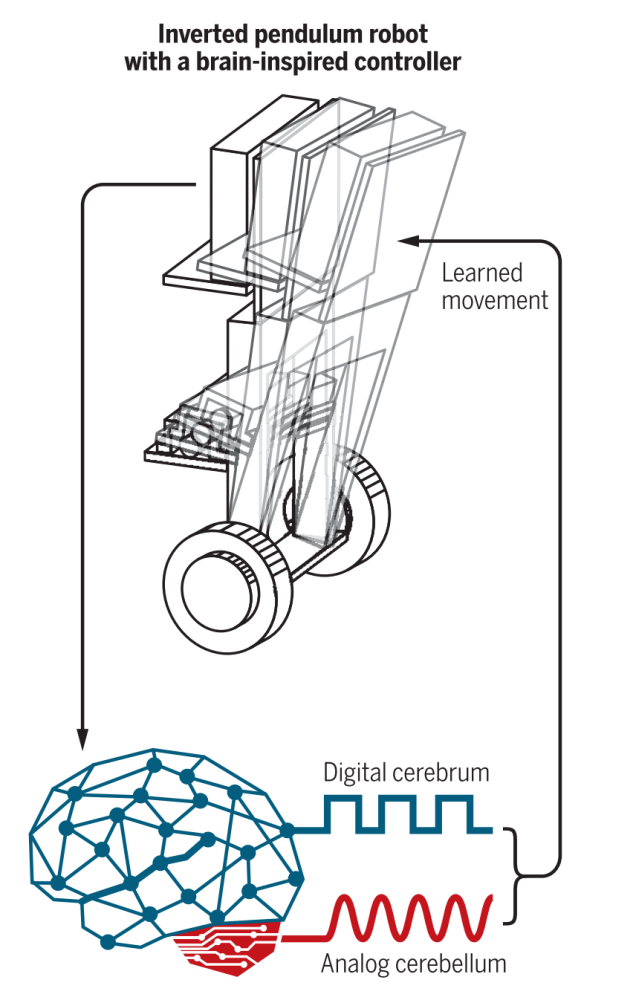
图|一种基于记忆器控制的混合系统。 倒立摆机器人具有模数混合计算和自适应学习能力,用于快速、节能和改进的机器人运动控制。 这些函数只由两个记忆体实现。 (资料来源:研究文件)
与标准的全数字系统相比,这种模拟信号系统的处理速度更快,效率更高。 这不仅减少了原有的功率需求,而且将处理循环时间从3000微秒减少到6微秒。 这大大提高了机器人的稳定性,如果只使用数字平台,机器人通常需要三秒钟以上才能完成单个任务时间,现在只有1秒完成并稳定下来。
除记忆器外,混合系统的其他部件可以通过商用电子元件来实现。 这将使类似的机器人运动控制器与更孝顺和更轻的机器人结合使用,使它们能够以更高的能量效率和更快的速度响应不断变化的环境。
然而,研究人员也表示,这只是目前概念的证明。 他们建造的机器人体积小,形状基本,在模拟电路上运行的算法相对简单。 然而,可以确定这一概念被证明是非常有前途的,并且在基于记忆器的神经形态学和模拟计算硬件方面投入了大量的研究和开发。
参考文献:
https://robotics.sciencemag.org/content/5/47/eabe6818
https://singularityhub.com/2020/10/26/how-giving-robots-a-hypid-human-like-pain-can-make-them-smarte